Soft Robotics for Wound Healing
Problem Statement
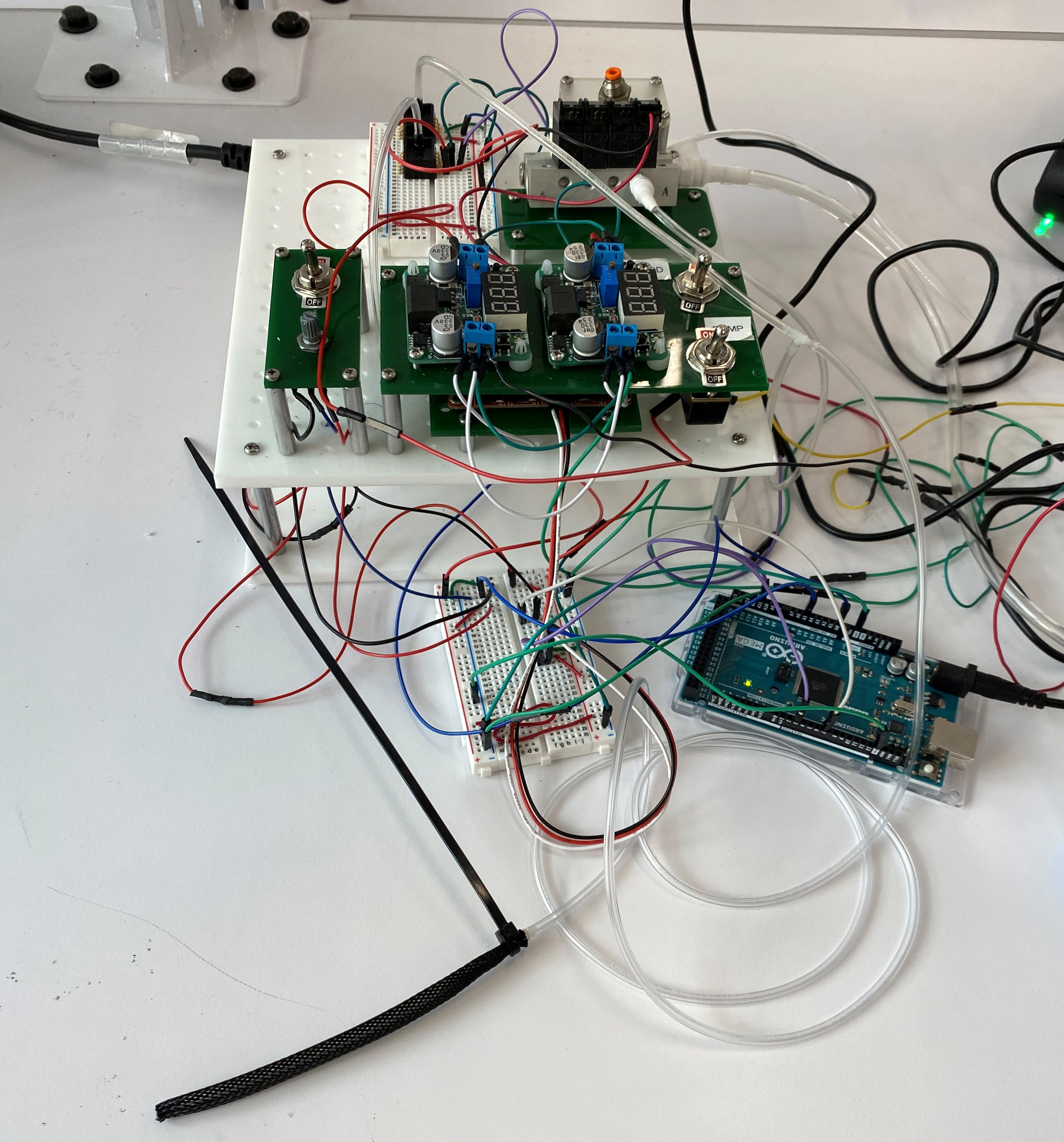
We are developing a soft robotic device that will assist in wound healing. There are many bandage based adhesive products that mechanically stimulate tissue growth. However, we aim to automate individual arms as pneumatic artificial muscles that can better promote uniform tissue growth and healing by applying modulated tension in response to growing tissue. We also aim to minimize scar formation with this method. This device has the potential to help both with at-home wound care and larger-scale burns and lacerations. We are currently working with Dr. Ann Fey and the Human-Enabled Robotic Technology lab to build pneumatic artificial muscles with low-cost materials such as mesh tubing, zip ties, and tension springs. Our next steps are to connect the muscles to a fluidic control board and eventually miniaturize the prototype.